Main focus
Sensor based handling technology - Robot systems and applications for 3D object recognition (reach into the box/bin picking, depalletizing)
In the area of sensor-based handling technology, we summarize all those robot systems in which objects have to be identified and localized or the robot movement has to be controlled and monitored with the help of a sensor or sensor information (e.g. 3D vision sensor, force-torque sensor). The robot applications are mainly in the field of 3D object recognition ("reach into the box" or "bin picking") but also in sensitive joining or grinding.
Robot-assisted 3D object recognition: AROTEC teaches robots to see
3D vision sensors are able to detect their environment or a scenery three-dimensionally (more precisely 2.5-dimensional). The corresponding spatial information is provided by the 3D vision sensors in the form of a so-called point cloud. 3D object recognition software installed on a computer can determine a specific object within a point cloud, along with its spatial position (or pose) within it. If you combine a conventional robot with a 3D vision sensor, the robot gets "eyes" and can see with them.
Advantage over 2D object recognition algorithms
The object to be removed, foreign objects and object overlays can be determined more precisely. This is because the additional - the third - dimension means that all existing information is taken into account. No information is lost.
3D object recognition - versatile application possibilities
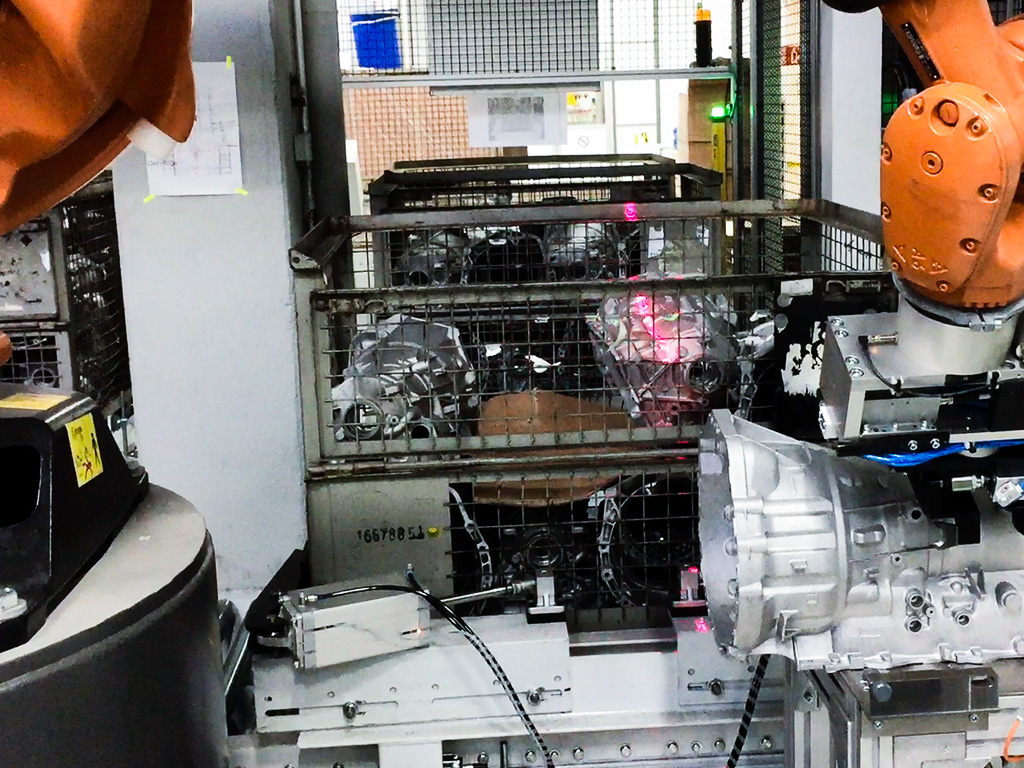
Numerous new robotic applications can now be realized with this technology. The most common application is the robot-assisted separation of partially ordered or disordered objects. For disordered objects, we speak of "bin picking", for partially ordered objects simply of depalletizing.
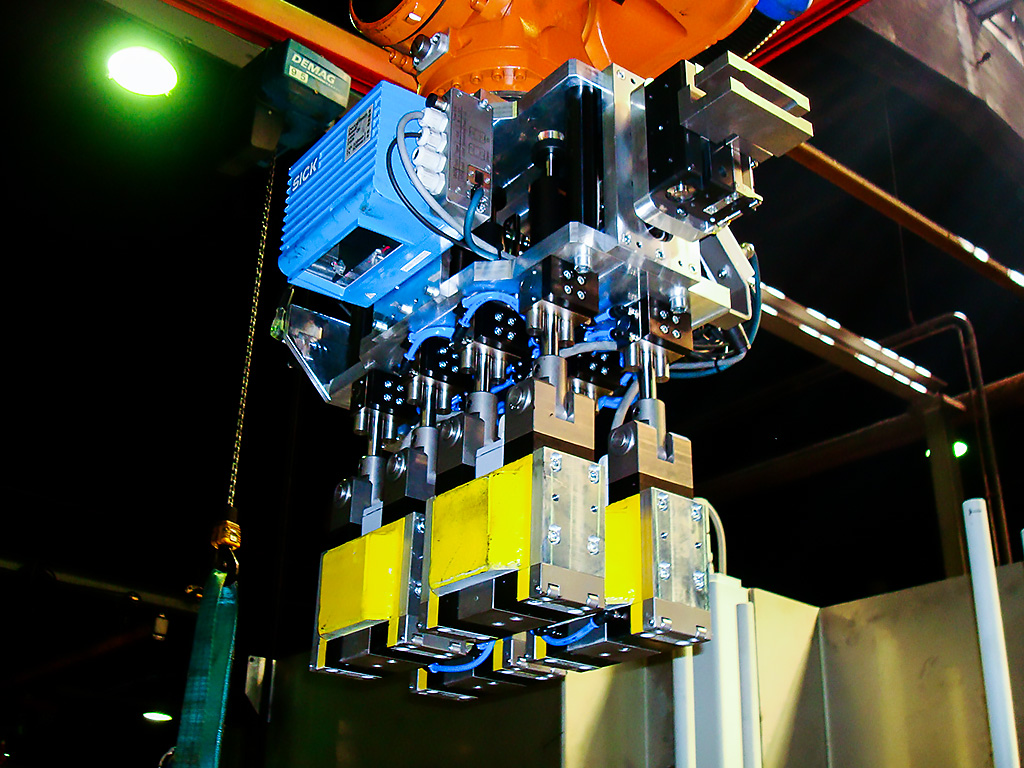
AROTEC is an experienced specialist in robotic "reach into the box". Our robotic systems for "reaching into the box" essentially consist of a robot (usually a 6-axis industrial robot), a specific end effector (or gripping system) and a 3D vision sensor together with our proprietary 3D object recognition software ART-3D. For robotic depalletizing of tires we call the 3D object recognition software DEPALGO@Tire.
The 3D object recognition software ART-3D is at the heart of all our robotic automation solutions for "reaching into the box" or depalletizing. The 3D object recognition software is not only responsible for locating one or more objects. It also decides which object the robot is to grasp with its end effector, and how or along which path, in a process-safe manner. The path planning module integrated in the ART-3D object recognition software is used for this purpose. This checks whether the object can be picked up by the robot without collision and brought out of the box. To ensure that the robot executes the planned movement exactly, path planning is not performed in Cartesian space, but in the robot's axis space (inverse transformation).
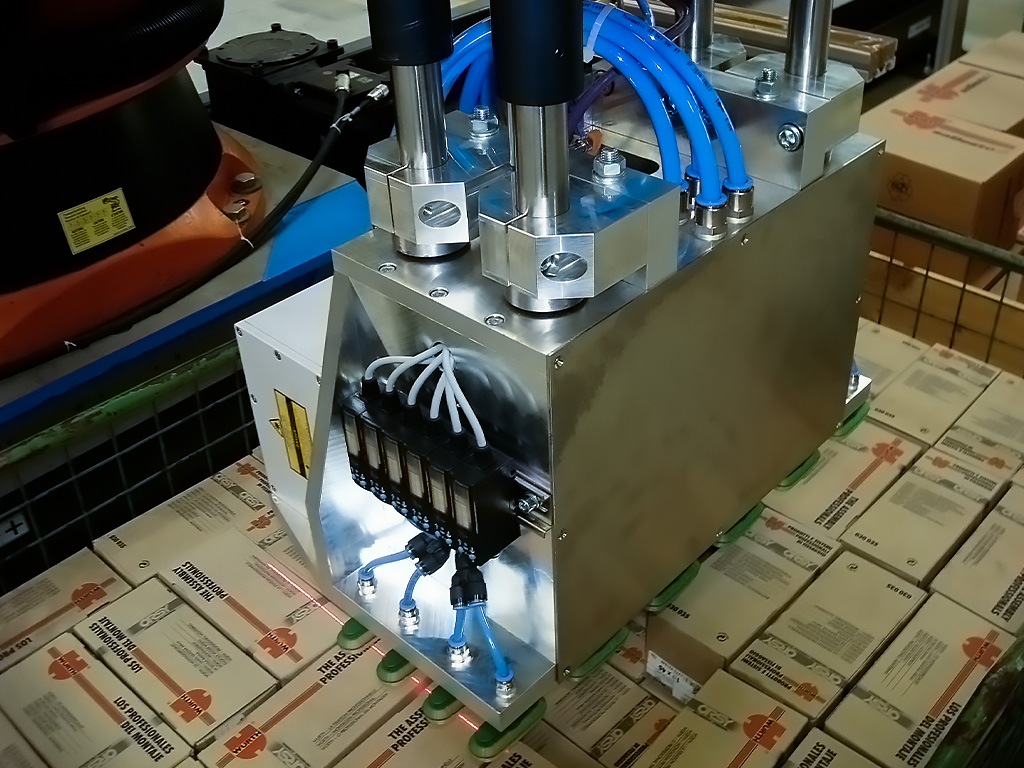
In order to achieve a high removal probability during the robot-assisted separation of objects, special attention must be paid to the design of the end effector. If its interference contour is too large, objects located near the side walls of the crate or container, for example, cannot be gripped by the robot without collision. In addition, the end effector must be able to pick up the object at different object or gripping points. This is where our many years of experience in robotics and gripper design come in handy. AROTEC supports you in gripper development so that you can grip any product - specifically tailored to your needs.
Additional plus: The 3D object recognition software can be used on conventional PCs running Windows.
The areas of application for the "reach into the box" or "bin picking" robot are almost limitless - separation of foundry, forged or stamped products, depalletizing and separation of cartons, (plastic) containers, tires, (frozen) baked goods, and much more.
3D object recognition can also be used in quality assurance (for quality and geometry inspection, completeness check, etc.) and in path-guided (post) machining processes. Examples are robot-assisted deburring, robot-assisted plasma cutting or welding.
With our robots for "reaching into the box" or depalletizing, you can experience 3D object recognition at the highest level.
Standardized interfaces enable communication with various 3D vision sensors (e.g., run-time measuring, projecting or light-sectioning sensors from different manufacturers), the cell controller and a higher-level host/control station system.

You want more information about our robot systems for "reaching into the box" or our 3D object recognition software? Then please contact us! We will also develop a customized robot system for you. No matter how complicated your requirements may be. No matter in which industry you are active.
