Objetivo principal
Tecnología de manipulación basada en sensores - Sistemas robóticos y aplicaciones para el reconocimiento de objetos en 3D (reach into the box/bin picking, despaletizado)
En el campo de la tecnología de manipulación asistida por sensores, incluimos todos aquellos sistemas robóticos en los que los objetos deben identificarse y localizarse o el movimiento del robot debe controlarse y supervisarse con ayuda de un sensor o de información de sensores (por ejemplo, sensor de visión 3D, sensor de fuerza-par). Las aplicaciones de los robots se sitúan principalmente en el campo del reconocimiento de objetos en 3D ("meter la mano en la caja" o "recoger contenedores"), pero también en uniones delicadas o rectificado.
Reconocimiento de objetos en 3D asistido por robots: AROTEC enseña a los robots a ver
Los sensores de visión 3D son capaces de captar su entorno o una escena tridimensionalmente (más concretamente en 2,5 dimensiones). Los sensores de visión 3D proporcionan la información espacial correspondiente en forma de la denominada nube de puntos. Un software de reconocimiento de objetos 3D instalado en un ordenador puede determinar un objeto específico dentro de una nube de puntos junto con su posición espacial (o pose) en ella. Si se combina un robot convencional con un sensor de visión 3D, el robot adquiere "ojos" y puede ver con ellos.
Ventaja sobre los algoritmos de reconocimiento de objetos 2D
El objeto que debe retirarse, los objetos extraños y las superposiciones de objetos pueden determinarse con mayor precisión. Porque a través de la dimensión adicional -la tercera- se tiene en cuenta toda la información existente. No se pierde ninguna información.
Reconocimiento de objetos en 3D: aplicaciones versátiles
Esta tecnología permite realizar numerosas aplicaciones robóticas nuevas. La aplicación más común es la separación asistida por robots de objetos parcial o totalmente desordenados. Con objetos desordenados hablamos de "bin picking", con objetos parcialmente ordenados simplemente de despaletización.
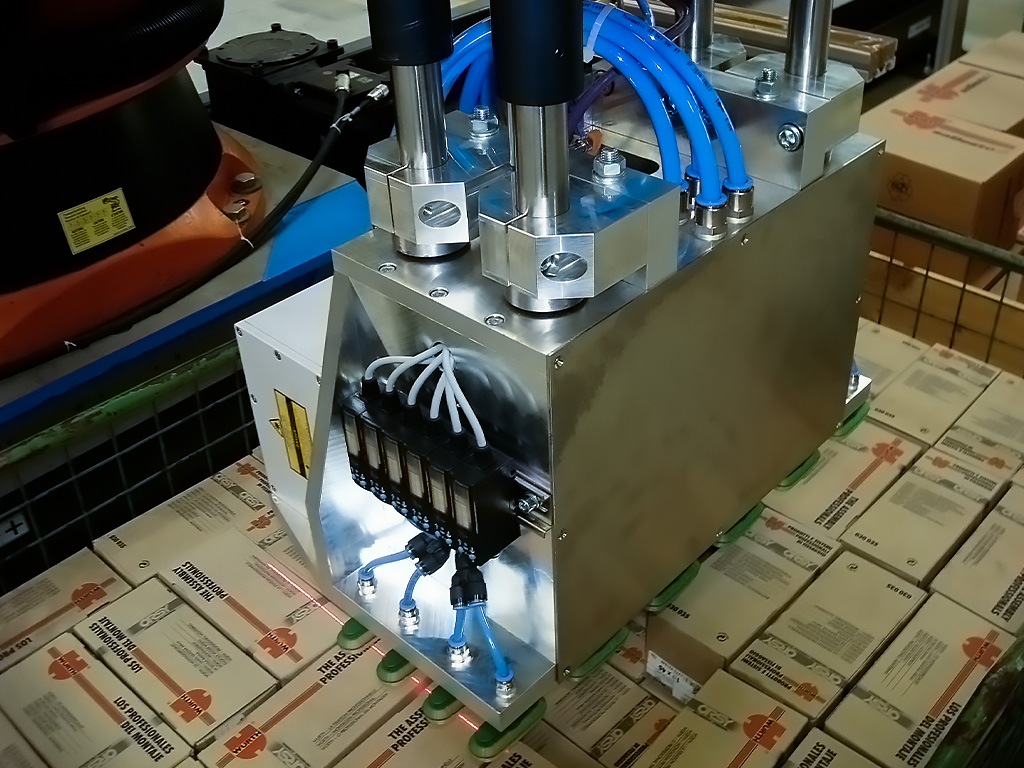
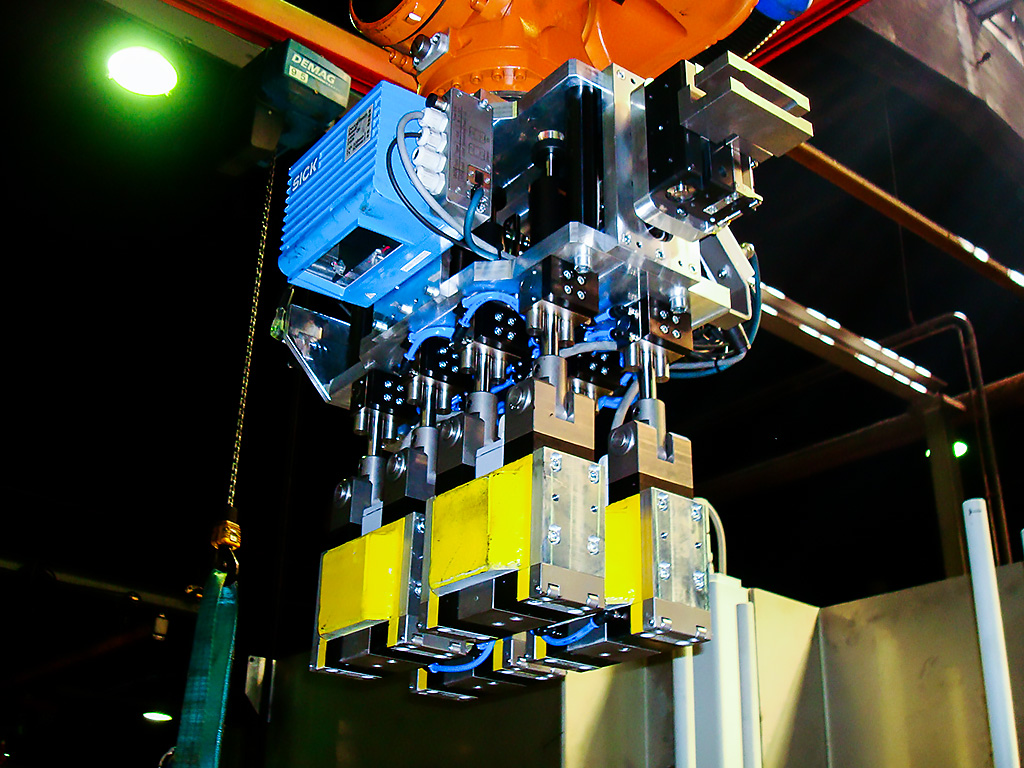
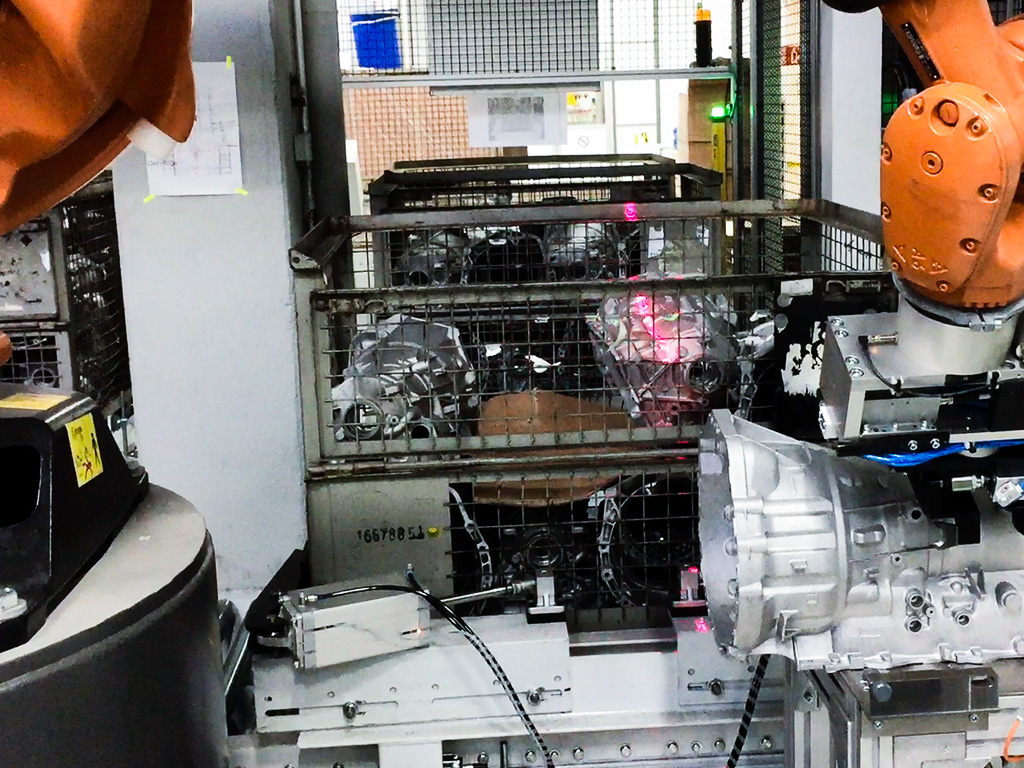
AROTEC es un especialista con experiencia en el "reach into the box" robótico. Nuestros sistemas robóticos para "alcanzar la caja" constan esencialmente de un robot (normalmente un robot industrial de 6 ejes), un efector final específico (o sistema de agarre) y un sensor de visión 3D junto con nuestro software propio de reconocimiento de objetos 3D ART-3D. Para el despaletizado de neumáticos asistido por robot, denominamos al software de reconocimiento de objetos 3D DEPALGO@Neumático.
El software de de reconocimiento de objetos ART-3D está en el corazón de todas nuestras soluciones de automatización robotizada para "meter la mano en la caja" o despaletizar. El software de reconocimiento de objetos 3D no sólo se encarga de localizar uno o varios objetos. También decide qué objeto debe agarrar el robot con su efector final y cómo o en qué trayectoria debe hacerlo de forma segura para el proceso. Para ello se utiliza el módulo de planificación de trayectorias integrado en el software de reconocimiento de objetos 3D ART-3D. Éste comprueba si el robot puede coger el objeto sin colisionar y sacarlo de la caja. Para garantizar que el robot ejecuta exactamente el movimiento previsto, la planificación de la trayectoria no se realiza en el espacio cartesiano, sino en el espacio de ejes del robot (transformación inversa).
Para conseguir una alta probabilidad de extracción durante la separación de objetos asistida por robot, debe prestarse especial atención al diseño del efector final. Si su contorno de interferencia es demasiado grande, los objetos que se encuentran cerca de las paredes laterales de la caja o el contenedor, por ejemplo, no pueden ser agarrados por el robot sin colisión. Además, el efector final debe ser capaz de coger el objeto en diferentes puntos de agarre. Aquí es donde usted se beneficia de nuestros muchos años de experiencia en el campo de la robótica y el diseño de pinzas. AROTEC le apoya en el desarrollo de pinzas para que pueda agarrar cualquier producto, especialmente adaptado a sus necesidades.
Ventaja adicional: el software de reconocimiento de objetos 3D puede utilizarse en PC convencionales con Windows.
Los campos de aplicación del robot "reach into the box" o "bin picking" son casi ilimitados: separación de productos de fundición, forjados o estampados, despaletizado y separación de cajas de cartón, envases (de plástico), neumáticos, productos de panadería (congelados) y mucho más.
El reconocimiento de objetos 3D también puede utilizarse en el control de calidad (inspección de calidad y geometría, comprobación de integridad, etc.) y en procesos de (re)mecanizado guiados por trayectoria. Ejemplos de ello son el desbarbado asistido por robot, el corte por plasma asistido por robot o la soldadura.
Con nuestros robots para "meter la mano en la caja" o despaletizar, podrá experimentar el reconocimiento de objetos 3D al más alto nivel.
Las interfaces normalizadas permiten la comunicación con diversos sensores de visión 3D (por ejemplo, sensores de medición en tiempo real, de proyección o de sección óptica de diferentes fabricantes), el controlador de la célula y un sistema de estación de control o host de nivel superior.

¿Desea más información sobre nuestros sistemas robóticos para "meter la mano en la caja" o nuestro software de reconocimiento de objetos en 3D? Póngase en contacto con nosotros. También desarrollamos para usted un sistema robótico a medida. No importa lo complicados que sean sus requisitos. Sea cual sea su sector de actividad.
